- Главная страница
- Продукты
- Переносной мобильный робот "Инженер"
Мобильные роботы Сервосила "Инженер"

Мобильные роботы Сервосила "Инженер" предназначены для применения в следующих областях:
- Образование и научные исследования,
- Службы спасения,
- Пожарные службы,
- Опасные производства,
- Инженерные и эксплуатационные службы,
- Эксплуатация туннелей и шахт.
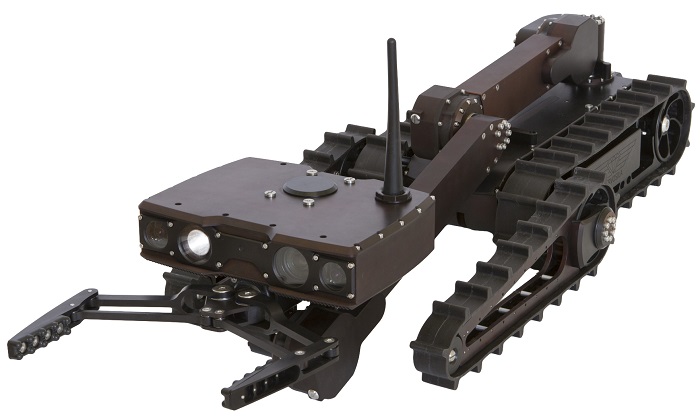
Малая масса - переносится в рюкзаке одним человеком
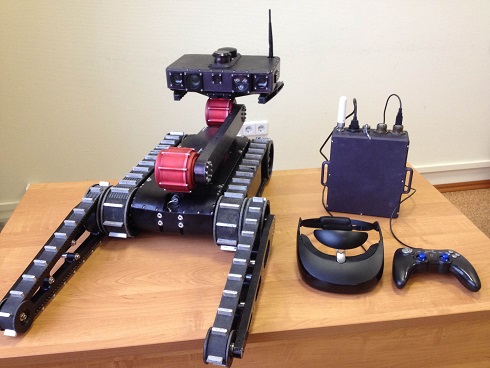
Мобильный робот Сервосила "Инженер" имеет малую массу и может переноситься в рюкзаке одним человеком. Это позволяет использовать робота в труднодоступных местах и местах стихийных бедствий, где перевозка робота грузовым автотранспортом затруднена.
Простой в управлении и эксплуатации
Мобильный робот прост в использовании и не требует особых навыков или образования для эксплуатации. Управление роботом осуществляется с помощью очков виртуальной реальности и джойстика. В очки проецируется изображение, полученное с камер робота, а джойстик используется для управления движением робота, а также для управления манипулятором типа "рука".


Жесткие условия эксплуатации
Робот предназначен для работы на улице, вне помещений. Робот полностью герметичен, способен работать под дождем, в снегу и в пыли. В зависимости от установленных полезных нагрузок, робот способен работать и при расширенном диапазоне температур.


Поднимается по ступенькам лестниц

Мобильный робот способен забираться по лестницам в лестничных пролетах многоэтажных домов.
Вспомогательные поворотные гусеницы позволяют роботу преодолевать различные препятствия на пути.
Восстановление после переворота
Мобильный робот способен встать в вертикальное положение после переворота набок или назад. Это позволяет продолжить работу в случае нештатных ситуаций и повысить эксплуатационную устойчивость робота в опасных местах его использования.
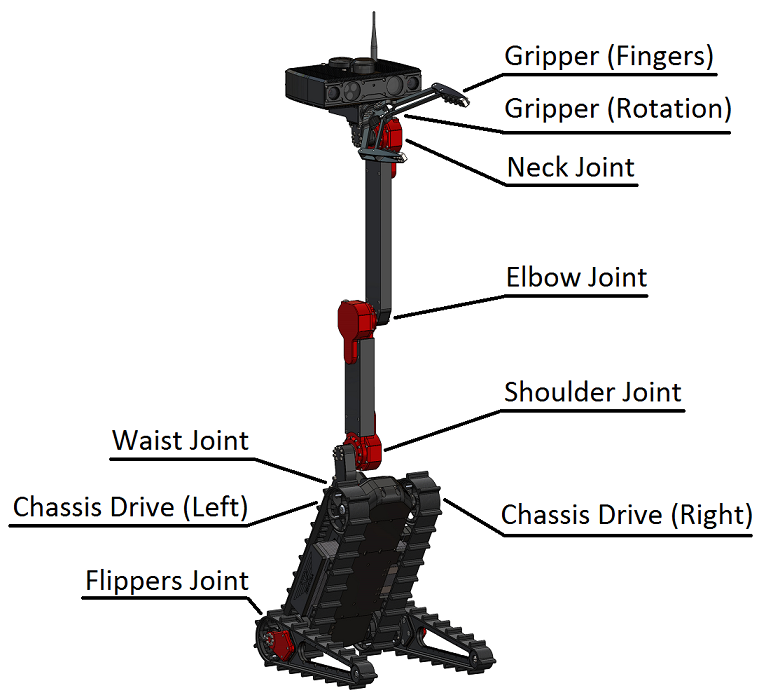
Манипулятор типа "рука"
Мобильный робот оснащен робототехническим манипулятором для захвата объектов. Манипулятор позволяет использовать робота для работы с потенциально опасными предметами, не подвергая риску человеческие жизни.


На "пальцах" манипулятора имеются места крепления дополнительного инструмента, который может потребоваться в особых ситуациях. Это позволяет адаптировать робота под конкретные ситуации и применения.
Количество степеней свободы манипулятора
Манипулатор робота может иметь различное число степеней свободы:




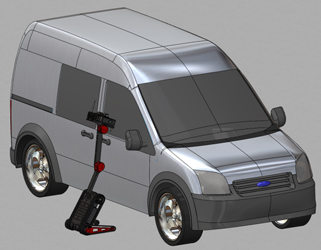
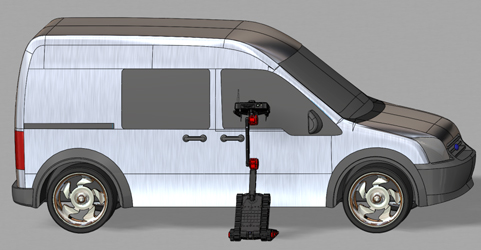
Голова робота
Максимальная высота подъема камер роботом выбрана так, чтоб позволяла роботу заглянуть внутрь припаркованных автомобилей, в том числе и автомобилей с высоким клиренсом. Робот сочетает малую массу для переноски одним человеком и возможность поднимать камеры на большую высоту для осмотра автомобилей.
Камеры и Датчики
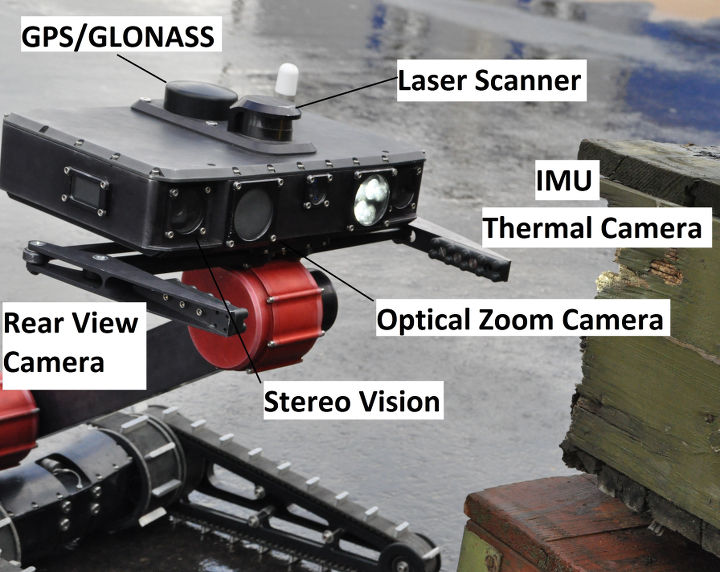
Камеры на голове робота расположены так, чтоб обеспечить круговой обзор без вращения головы. Это облегчает управление роботом, так как оператор может быстро переключаться на камеры переднего или заднего вида.

Трехмерное сканирование и стереозрение
Мобильный робот оснащен штатным лазерным сканнером для трехмерного сканирования объектов и помещений и системой стереозрения. Эти приборы используются для решения задач автономной навигации и манипулирования объектами с помощью манипулятора типа "рука".
Автоматическое обнаружение препятствий
Лазерный сканер и система стереозрения позволяют роботу автоматически обнаруживать препятствия и корректировать траекторию движения для избегания столкновения. Это значительно снижает нагрузку на оператора и позволяет успешно завершить выполнение задания в сложных условиях движения.
Автоматическая навигация и построение цифровых карт маршрута
Мобильный робот строит трехмерные цифровые карты пройденного маршрута при движении по местности или внутри помещений. Цифровые карты маршрута позволяют роботу совершать автономные переходы в случае необходимости, например, при потере радиосвязи. Цифровые карты строятся на основе данных, полученных с лазерного сканера, инерциальных датчиков, датчиков одометрии, системы стереозрения и GPS/ГЛОНАСС приемника.
Замена батареи в полевых условиях
Мобильный робот спроектирован с расчетом на то, что батарея может быть заменена в полевых условиях без применения инструментов. Батареи могут заряжаться в полевых условиях от генератора или прикуривателя автомобиля. Это позволяет обеспечить непрерывное использование робота посредством ротации батарей.
Места крепления модулей целевых нагрузок
Конструкция робота предусматривает простую установку дополнительных модулей целевой нагрузки. Для подключения дополнительных модулей предусмотрены штатные места установки.
Места установки включают:
- Штатные места крепления внешних модулей на шасси робота, голове робота и манипуляторе.
- Штатные разъемы для подключения к системе питания робота.
- Штатные разъемы для подключения к бортовым информационным шинам робота CAN и Ethernet.
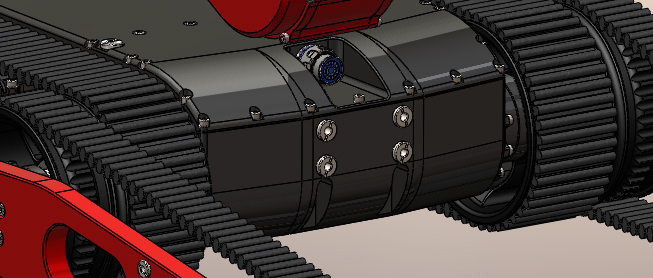
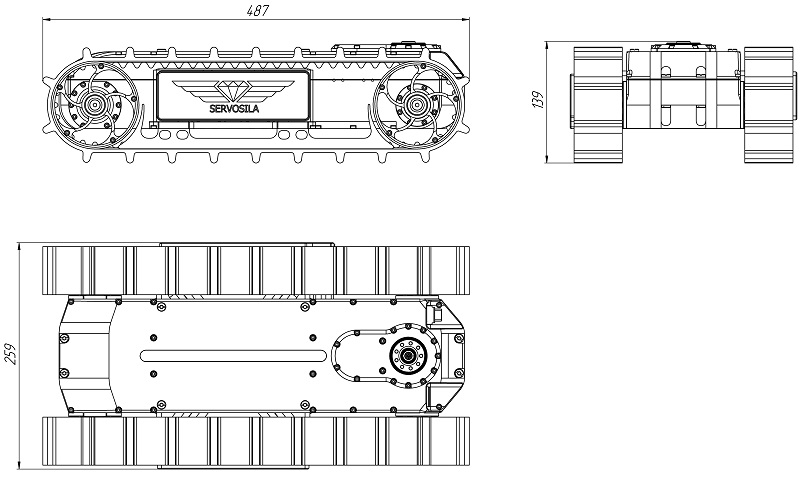
Шасси
Скачать CAD модель (файл *.STEP) "Шасси робота с поворотными гусеницами"
Скачать CAD модель (файл *.STEP ) "Шасси робота без поворотных гусениц"
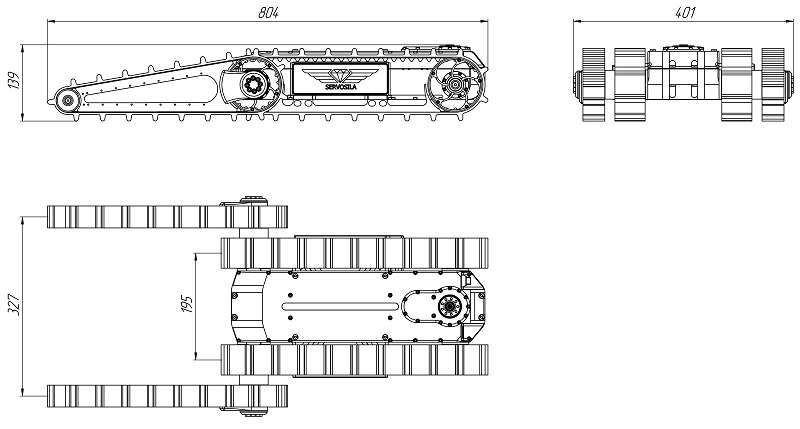
Технические характеристики: Робот "Инженер"
| Параметр | Величина |
|---|---|
| Масса робота | 13-25 кг в зависимости от конфигурации |
| Масса носимой аппаратуры управления | 5.0 кг |
| Максимальная высота подъема камер | 130 см |
| Максимальная скорость движения | 5 км/ч |
| Максимальная масса груза, поднимаемого рукой | До 6кг |
| Длительность работы - в движении |
~4 часа в зависимости от режима движения |
| - в режиме наблюдения без движения | До 15 часов в зависимости от подключенных модулей целевых нагрузок |
| Максимальная высота преодолеваемых ступенек лестниц | До 22 см |
| Максимальный угол подъема по лестницам | До 35 градусов |
| Класс защиты | IP68 Работа в пыли Погружение в воду до глубины 1 метр (лужи) |
| Рабочий диапазон температур | -10С … +40C, с доп.ограничениями по использованию конкретных целевых нагрузок опционально: расширенный диапазон температур |
| Дальность радиосвязи, - открытая местность |
до 5км |
| - в помещение или городских условиях | Несколько сотен метров |
| Рабочая частота радиоканала | 902-928 Мгц или 2.4GHz |
| Дальность трехмерного лазерного сканирования | До 4.5 м |
| Камеры |
|
| Тепловизор | внешний, опция |
| Средства автоматической навигации |
|
| Подсветка | Светодиодный фонарь видимого диапазона |
| Батарея | LiFePo4, в защищенном корпусе, меняемая в полевых условиях без инструментов |
| Количество штатных мест подвески дополнительных полезных нагрузок | 5 |
| Бортовые информационные шины для подключения внешних модулей дополнительных нагрузок | CAN Ethernet |