- Главная страница
- Продукция
- Робототехнические Манипуляторы
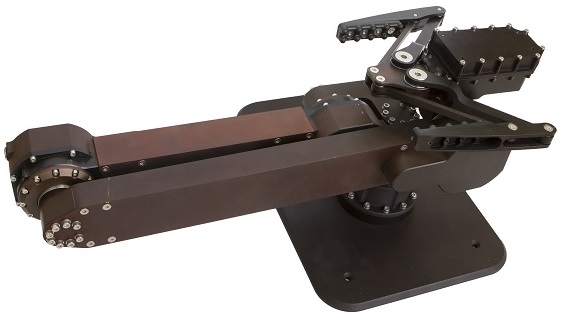
Робототехнические Манипуляторы Сервосила

Робототехнические манипуляторы Сервосила предназначены для оснащения мобильных сервисных роботов, а также для проведения научных исследований в области систем управления сервисными роботами с искусственным интеллектом.
Манипуляторы Сервосила можно применять вне помещений в любую погоду, подключать к бортовым системам электропитания мобильных роботов, ремонтировать в полевых условиях, а также эксплуатировать в жестких режимах, когда возможны сильные удары по манипулятору при движении или переворотах мобильных роботов.
Всепогодные устройства

Робототехнические манипуляторы Сервосила специально спроектированы для работы вне помещений. Манипуляторы штатно работают как под дождем, так и в снегу и в пыли. Допускаются кратковременные полные погружения манипулятора в воду. Корпуса сервоприводов руки, а также все внешние электрические разъемы соответствуют стандарту IP68 по влаго- и пыленепроницаемости. Благодаря этим качествам, манипуляторы Сервосила можно применять на мобильных сервисных роботах, предназначенных для работы в полевых условиях и на улице.
Ударостойкость и защищенность

Мобильные сервисные роботы иногда врезаются в препятствия, ударяются о предметы при работе и даже переворачиваются. Манипуляторы Сервосила специально разработаны для работы в таких режимах.
В манипуляторах Сервосила отсутствуют внешние кабели, которые могут зацепиться за ветки при движении мобильного робота через кусты или в лесу. Все кабели надежно укрыты внутри корпуса руки.
Малая масса

Манипуляторы Сервосила обладают значительно меньшей массой по сравнению с традиционными промышленными манипуляторами. Разработчики мобильных роботов пытаются экономить каждый грамм массы конечного изделия, чтоб повысить продолжительность работы робота на одной зарядке батареи, а также увеличить проходимость мобильного робота и упростить его транспортировку. Манипуляторы Сервосила специально спроектированы и оптимизированы для достижения минимально возможной массы при заданной грузоподъемности.
Работа от бортовых источников питания

Робототехнические манипуляторы Сервосила неприхотливы к качеству входного электропитания, что очень важно для обеспечения интеграции с мобильными роботами, так как зачастую возможности бортовых систем электропитания мобильных роботов сильно ограничены.
Манипуляторы Сервосила можно питать напрямую как от бортовых батарей так и от электрогенераторов мобильных роботов. При этом допускаются большие скачки напряжения, а также значительное снижение входного напряжения при разряде бортовых батарей роботов. Сервоприводы руки имеют функцию встроенного регулирования напряжения, специально разработанную для обеспечения работы в условиях, когда бортовое напряжение может быть нестабильным.
В комплекте с манипулятором также поставляется штатный блок питания, который позволяет питать руку от обычных сетей переменного тока 220В/110В. Это удобно для работы с рукой в лабораториях или при отладке программного обеспечения в офисе, когда нет необходимости питать руку от батареи или от других бортовых источников электропитания.
Управление от бортовых компьютеров роботов

Манипуляторы Сервосила подключаются к бортовым сетям CANbus мобильных сервисных роботов. Программное обеспечение, работающее на бортовых компьютерах роботов, может управлять рукой, посылая команды по стандартному протоколу CANopen. Это позволяет роботу, оснащенному рукой Сервосила, работать как в режиме автономного/автоматического управления, так и в режиме телеприсутствия с дистанционным управлением.
Штатное программное обеспечение

Манипуляторы Сервосила поставляются со штатным программным обеспечением, обеспечивающим тестирование, конфигурацию и настройку манипуляторов. Интеграция руки с бортовым программным обеспечением мобильного сервисного робота происходит по открытому протоколу CANopen через шину CANbus. При этом бортовой компьютер сервисного робота может работать под управлением Linux, Windows или вообще без операционной системы. Установки каких-либо драйверов на бортовой компьютер робота для работы руки не требуется. Единственное требование к бортовому компьютеру — это наличие поддержки шины CANbus, которая используется для посылки команд манипулятору и получения телеметрии.
Вместе с манипулятором поставляются примеры кода на C++, а также пакет для работы с манипулятором из среды программирования ROS.
Также рукой можно управлять с обычного персонального компьютера или ноутбука посредством адаптера USB-to-CAN. Штатное программное обеспечение руки поддерживает такой режим работы.
Полноповоротный захват

Захваты манипуляторов Сервосила спроектированы для работы с самыми разными предметами, с которыми сервисный мобильный робот может столкнуться во время эксплуатации. В отличие от промышленных роботов, которые рассчитаны на многократное повторение одних и тех же операций с одними и теми же предметами, сервисные мобильные роботы часто используются для выполнения уникальных операций. Поэтому, для манипуляторов Сервосила был разработан универсальный тип захвата, который может поднимать и большие и маленькие предметы, как жесткие, так и мягкие, в воде, в снегу и в пыли. Например, открывание дверей и вращение дверных ручек — это одна из целевых задач, под которые оптимизированы захваты Сервосила.
Сервосила выпускает как простые захваты, работающие только на сжатие-разжатие, так и более функциональные полноповоротные захваты.
Разъем для подключения целевых нагрузок

Довольно часто на манипуляторы мобильных роботов требуется установить дополнительные модули полезной нагрузки, например, видеокамеры, датчики касания, инфракрасные датчики измерения расстояний или сенсорные головы роботов. Для таких целей на манипуляторах Сервосила предусмотрен штатный герметичный электрический разъем. Этот разъем позволяет подключать внешние модули к бортовым сетям CANbus, Ethernet или USB, а также к бортовой сети электропитания робота. Манипуляторы Сервосила обеспечивают сквозную внутреннюю проводку кабелей, которая обеспечивает простоту и надежность интеграции внешних модулей с шасси и с бортовой системой управления мобильного робота.
Минимальные размеры в сложенном состоянии
На шасси мобильных роботов всегда мало места, а манипулятор может быть не единственным модулем полезной нагрузки. По этой причине у манипуляторов Сервосила предусмотрена возможность складывания в очень компактное по объему и габаритам состояние. В сложенном состоянии манипуляторы Сервосила занимают минимум места, не мешают работе других модулей полезной нагрузки, а также находятся в удобном положении для транспортировки мобильного робота или переноски за плечами или в рюкзаке.
Интеллектуальные сервоприводы

Робототехнические манипуляторы Сервосила сделаны на основе интеллектуальных сервоприводов разработки компании Сервосила. В основе конструкции сервоприводов Сервосила лежат малогабаритные бесколлекторные двигатели, управляемые микропроцессорными контроллерами согласно векторному закону управления. Волновые редукторы обеспечивают минимальный люфт выходного вала, а также малые габариты и массу.
Программное обеспечение микропроцессорного контроллера, встроенного в каждый из приводов обеспечивает управление приводом в режимах «по положению вала», «по скорости» и «по моменту». Регулирование основано на ПИД регуляторах, реализованных в программном обеспечении микропроцессорного контроллера привода.
Сервоприводы получают команды от бортового компьютера мобильного робота по шине CANbus и отсылают телеметрию обратно в бортовой компьютер.
Ремонт заменой крупных блоков
Робототехнические манипуляторы Сервосила разработаны с учетом возможности ремонта в полевых условиях заменой крупных блоков. В частности, замену сервопривода или захвата руки можно произвести с использованием одной отвертки. Все кабельные соединения внутри руки выполнены на развинчивающихся руками герметичных разъемах, так что пайка для замены блоков не требуется.

Конфигурации манипулятора
При заказе манипулятора Сервосила можно выбрать следующие опции:
- количество степеней свободы манипулятора (4, 5 или 6),
- длины каждого из сегментов руки,
- моменты сервоприводов каждого из звеньев из каталога сервоприводов,
- количество и тип проводов в кабеле для подключения внешних модулей полезной нагрузки, который проходит сквозь руку,
- тип захвата.




Технические характеристики
| Параметр | Значение |
|---|---|
| Количество степеней свободы | 4, 5 или 6 |
| Масса поднимаемого груза | 4 кг, 6кг или 8кг |
| Входное напряжение | 12-36V DC или 220/110V AC от штатного блока питания |
| Номинальное напряжение | 24V DC |
| Интерфейс управления | CANbus с CANopen |
| Максимальная потребляемая мощность | 150-300 ватт в зависимости от конфигурации |
| Класс защиты | IP68 |
| Рабочая температура | -20C … +65C |
| Масса | 7-9кг в зависимости от конфигурации |