- Главная страница
- Продукция
- Сервоконтроллеры и Контроллеры Бесколлекторных Двигателей
Сервоконтроллеры

 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
Скачать
SC-120 Datasheet [PDF],
SC-60 Datasheet [PDF],
SC-25 Datasheet [PDF],
SC-series Device Reference [PDF],
SC-series Programming Guide [PDF],
SC-series C++ Sample Projects [ZIP],
SC-series CANopen Electronic Datasheet [EDS],
"Кабели и разъемы для SC-25" [PDF],
брошюру по контроллерам SC-25 [PDF],
файлы CAD для SC-120R,
файлы CAD для SC-60R,
файлы CAD для SC-60C,
файлы CAD для SC-25R,
файлы CAD для SC-25C,
...еще.
Сервоконтроллеры Сервосила — это встраиваемые блоки управления для сервоприводов или тяговых электроприводов на основе бесколлекторных синхронных или коллекторных электродвигателей. Контроллеры превращают любой бесколлекторный или коллекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод. Контроллеры выполняют функцию сервоусилителей и преобразователей частоты.
Сервоконтроллеры предназначены для управления электродвигателями (PMSM, BLDC, Direct Drive, Gimbal, Brushed) любых производителей в сочетании с различными энкодерами положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них (например,
RLS,
Netzer,
KingKong,
AMS,
CUI Devices и др.). Для подключения к управляющим компьютерам АСУ или к бортовым системам управления сервоконтроллеры предоставляют интерфейсы управления CAN, USB и ШИМ.
Компания Сервосила изначально разработала данные сервоконтроллеры для применения в своих собственных продуктах — руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры Сервосила нашли широкое применение в самых различных отраслях промышленности и науки, - везде, где требуется компьютерное управление бесколлекторными или коллекторными двигателями.
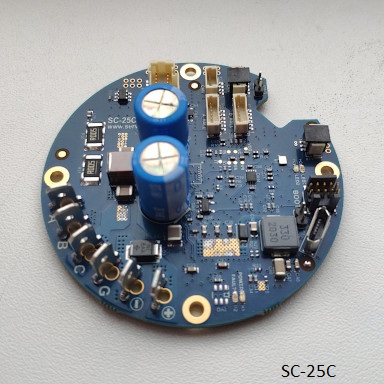
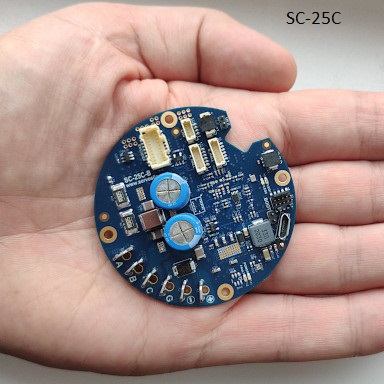
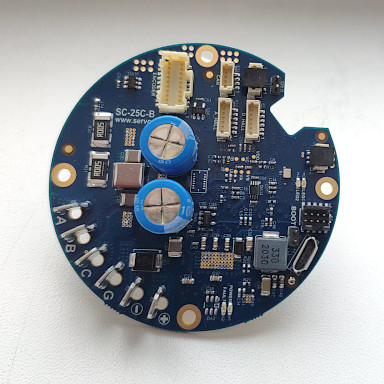
Контроллеры бесколлекторных двигателей поставляются в двух исполнениях - платы прямоугольной формы (модели SC-60R и SC-25R) и платы круглой формы (модели SC-60C и SC-25C). Данные модели совершенно идентичны по интерфейсам и возможностям и отличаются только формой плат и номинальными токами двигателя.
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
Основными областями применения данных контроллеров бесколлекторных двигателей являются:
- сервомеханизмы, сервоприводы,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- стартер-генераторы ДВС и турбин,
- медицинская техника,
- сельскохозяйственная техника,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- подвесы телескопов, астрономические приборы,
- системы компьютерного зрения.
Поддерживаемые типы двигателей (любых производителей):
- Бесколлекторные синхронные двигатели (PMSM, BLDC, Direct Drive, Gimbal), в том числе T-Motor, Maxon, Dunker и других.
- Бездатчиковые и с датчиками Холла (Sensorless и Sensored).
- Со встроенными энкодерами и с внешними энкодерами.
- Коллекторные двигатели, в том числе, с энкодерами для измерения скорости и положения.
- Соленоиды.
Контроллеры имеют набор интерфейсов для подключения внешних датчиков абсолютного положения вала («энкодеров») с разрешением до 32 бит:
- Квадратурный интерфейс с индекс-сигналом,
- BISS-C интерфейс (в том числе к магнитным энкодерам фирмы RLS),
- SSI интерфейс (например, к энкодерам СКБ ИС),
- RS485 интерфейс (например, к двойным энкодерам фирмы KingKong),
- ШИМ интерфейс (например, к энкодерам фирмы AMS),
- SPI интерфейс (например, к энкодерам фирмы CUI Devices).
Датчики положения вала («энкодеры») применяются в различных режимах сервоуправления, в режимах Direct Drive, а также для поддержания плавного движения вала на низких скоростях вращения. Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в приводе присутствует, то контроллеры используют его, когда это имеет смысл. Если энкодер не подключен, то контроллеры могут работать и без него, но, возможно, в упрощенном режиме работы.
Подключение двигателей, датчиков положения вала, датчиков Холла и управляющих шин CAN, USB и ШИМ производится:
- либо через штатные разъемы на платах контроллеров,
- либо посредством припайки кабелей в специально предусмотренные отверстия на платах, чем обеспечивается виброустойчивость соединений.
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
 ЕСТЬ НА СКЛАДЕ
ЕСТЬ НА СКЛАДЕ
Конструктивно разъемы для подключения кабелей расположены только с одной из сторон плат; тыльная сторона плат не имеет разъемов и предназначена для подключения теплоотводного радиатора или для монтажа платы напрямую на корпус электропривода, использующегося для отвода тепла от платы.
Контроллеры не имеют разъемов, выходящих «в сторону»; все разъемы имеют только ориентацию «вверх». Это сделано для облегчения интеграции контроллеров внутрь корпусов устройств, таких как сервоприводы цилиндрической формы, или в отсеки электрооборудования небольших габаритов.
Предусмотрен механизм для обновления прошивки плат через порт RS232.
Режимы управления
В контроллерах реализованы следующие режимы управления электродвигателями:
- Стабилизация выходного момента на валу (ETC: Electronic Torque Control). Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах.
- Стабилизация скорости вращения вала (ESC: Electronic Speed Control). Применяется для поддержания заданной скорости вращения двигателя, вне зависимости от меняющейся внешней нагрузки, например, в тяговых электроприводах конвейеров, насосов или в шасси мобильных роботов. Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
- Сервоуправление (Servo Control) — поворот до заданного положения вала и последующее удержание вала с использованием датчика положения вала (энкодера) через редуктор или напрямую. Применяется в робототехнических руках-манипуляторах, АСУ ТП, станках с ЧПУ и любых других устройствах, где необходимо повернуть вал двигателя на заданный угол, а затем поддерживать положение при изменяющейся внешней нагрузке. В зависимости от подключенного энкодера положения вала обеспечивается точность поворота сервопривода до 32 бит.
- Direct Drive — точное управление положением вала посредством прямого позиционирования магнитного поля статора электродвигателя, в том числе при отсутствии редуктора в электроприводе. Применяется в системах компьютерного зрения, станках с ЧПУ, линейных двигателях, - везде где требуется максимальная точность управления положением без редукторов. В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
- Тормоз вала («блокировка вращения»), - блокировка вращения вала вне зависимости от воздействия внешних нагрузок, например, для фиксации остановленного конвейера или для торможения колес мобильного шасси, стоящего «на горке». Блокировка происходит только работой бесколлекторного двигателя без применения каких-либо дополнительных тормозных устройств. Для блокировки вала применяется метод, минимизируещий потребление электрической энергии.
- Рекуперация энергии в батарею / Стартер-Генератор. Если контроллер питается от батареи, то он способен «пропускать» ток обратно в батарею тогда, когда электродвигатель работает в режиме электрогенератора, например, при торможении мобильного шасси. При этом возможно программное управление силой тока, идущего в батарею. Этот режим также применяется в системах «стартер-генератор» в сочетании с двигателями внутреннего сгорания (ДВС), в которых после запуска ДВС электродвигатель переходит в режим электрогенератора.
В сервоконтроллерах Сервосила реализованы современные алгоритмы управления электродвигателями:
- Direct Drive Control,
- Gimbal Control,
- Electronic Speed Control (ESC),
- Electronic Torque Control (ETC),
- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Также с помощью данных контроллеров можно управлять соленоидами.
Автонастройка
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам («утерян datasheet»).
Интерфейсы программного управления
Предусмотрены следующие интерфейсы для интеграции с управляющими компьютерами или бортовыми системами управления:
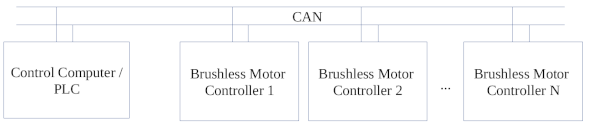
- Шина CAN с протоколом верхнего уровня CANopen. Контроллеры имеют два порта CAN для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров Сервосила могут быть подключены к единой шине CAN. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
- Порт USB, который автоматически инициализируется, как виртуальный COM-порт в Windows 11,10,8 и в Linux. Установка специальных драйверов не требуется ни в Windows, ни в Linux. Порт USB у контроллеров Сервосила удобен тем, что позволяет управлять электродвигателями с помощью обычных персональных компьютеров или их промышленных вариантов, например, на испытательных стендах или автоматизированных системах контроля качества. Контроллеры Сервосила способны выполнять функцию USB-в-CAN шлюза («переходника USB2CAN») для обеспечения доступа управляющих компьютеров к сети CAN. Этот «переходник» работает как в Windows 11, 10, 8, так и в Linux.
- Вход ШИМ, используемый для подключения RC радиоприемников, автопилотов или контроллеров, способных выдавать сигнал с широтно-импульсной модуляцией.
К Windows 11/10/8/7 контроллеры Сервосила подключаются через интерфейс USB, который автоматически определяется, как виртуальный COM-порт. Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер Сервосила через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
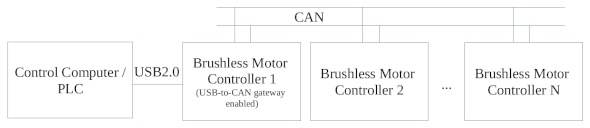
Подключенный по USB контроллер двигателя также выполняет роль USB-в-CAN шлюза и позволяет обеспечить доступ управляющих компьютеров с ОС Windows или ОС Linux ко всей сети CAN. Таким образом, через единый интерфейс USB к компьютеру с ОС Windows или Linux можно подключить «гирлянду» контроллеров Сервосила для управления целым комплексом электроприводов, например, в составе испытательного стенда, АСУ ТП или мобильного робота, а также любые другие устройства, поддерживающие шину CAN, например, инерциальные датчики или GPS приемник.
К ОС Linux контроллеры Сервосила подключаются либо по интерфейсу CAN, либо по интерфейсу USB. В случае подключения по CAN управляющие пользовательские программы могут использовать стандартный Linux SocketCAN API для посылки команд в контроллеры Сервосила и для получения телеметрии в обратном направлении. В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.

Если же контроллер Сервосила подключен к Linux через интерфейс USB (а не через CAN), то контроллер двигателя идентифицируется в Linux, как виртуальный COM-порт, также, как и в ОС Windows. В этом случае управляющие пользовательские программы могут использовать либо стандартный Linux SocketCAN API через встроенный в Linux драйвер SLCANd, либо же работать с виртуальным COM-портом напрямую с использованием стандартного текстового протокола команд SLCAN.

При подключении через USB к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CAN. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CAN порта. В этом случае контроллеры Сервосила могут играть вспомогательную роль интерфейсного адаптера USB-в-CAN.
Для разработки программ, управляющих контроллерами Сервосила через CAN или USB, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
Программное обеспечение "Сервоскоп"
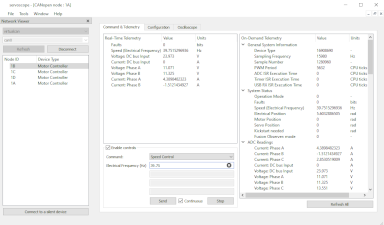
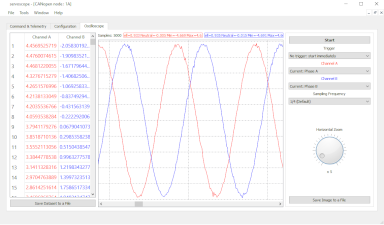
В комплект поставки входит программное обеспечение «Сервоскоп», которое автоматизирует процесс настройки контроллеров под конкретный электродвигатель и позволяет строить графики и получать отладочную телеметрию с электроприводов по сети CAN или USB. Данное графическое программное обеспечение работает как под ОС Windows 11/10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
Симулятор сервоприводов
Для упрощения отладки пользовательского управляющего программного обеспечения в комплект поставки входит программный симулятор контроллера Сервосила. Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CAN/CANopen контроллеров Сервосила и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Технические характеристики
| Параметр | Значение |
|---|---|
| Поддерживаемые типы двигателей | Бесколлекторые синхронные двигатели (brushless): PMSM, BLDC, Direct Drive, Gimbal, как с датчиками Холла, так и бездатчиковые. Коллекторные двигатели (brushed), в том числе, с энкодерами для измерения скорости и положения. Соленоиды. |
| Номинальный ток двигателя | SC-60: до 32Arms или 45A по амплитуде тока в фазе SC-25: до 17Аrms или 25А по амплитуде тока в фазе |
| Входное напряжение питания | 6-60 V DC |
| Режимы управления электродвигателями | Стабилизация момента на валу. Стабилизация скорости (ESC). Сервоуправление. Прямое управление (Direct Drive). Тормоз вала. Рекуперация (стартер-генератор). Системная идентификция (автонастройка). |
| Встроенные алгоритмы управления электродвигателями | Field-Oriented Control (FOC), EMF Observer, Hall Sensors Observer, D-Q axis Coupling Compensation, Field Weakening, Защиты, Управление динамикой разгона-торможения. |
| Функция автонастройки под электродвигатель | Есть |
| Интерфейсы к датчикам положения вала (энкодерам) | Квадратурный с индексным сигналом, BISS/C, SSI, ШИМ, SPI |
| Максимальное разрешение датчика положения вала | 32 бит |
| Встроенный шлюз сетей управления | USB-to-CAN шлюз Поддерживаются 11-битные и 29-битные идентификаторы шины CAN. |
| Управляющие интерфейсы | Шина CAN: протокол CANopen с 11-битными идентификаторами. USB: виртуальный COM-порт с текстовым протоколом SLCAN; Сигнал ШИМ для сервоуправления или управления по скорости. |
| Количество последовательно подключенных контроллеров («гирлянда») в единой цепочке управления и питания: | До 127 шт через шину CAN. До 16 шт через встроенный USB-to-CAN шлюз. |
| Терминальное сопротивление 120 Ом для шины CAN | Есть. Включается-выключается посредством джампера. |
| Возможные варианты скорости передачи данных по шине CAN | 1 мбит/сек 500 кбит/сек 250 кбит/сек 125 кбит/сек 100 кбит/сек 50 кбит/сек |
| Количество CAN портов | 2 шт (параллельные) |
| Количество USB портов | 1 шт |
| Функции GPIO интерфейса | 2шт. входов для концевых выключателей 1шт. вход для emergency stop 1шт. выход GPIO (дискретный или ШИМ) 1шт. вход GPIO (дискретный) |
| Поддерживаемые операционные системы | Windows 11, 10, 8, 7 (драйвер не требуется или имеется) Linux (драйвер не требуется): Debian, Ubuntu, Astra Linux, Raspberry PI OS и другие. |
| Интерфейсы и API для программного управления | Linux SocketCAN API, CANopen, Текстовый протокол SLCAN через виртуальный COM-порт (USB) для Windows 11, 10, 8 и Linux, Сигнал ШИМ для сервоуправления или управления по скорости, G-code, DLL API для C++, C#, Python |
| Программный симулятор программного интерфейса CAN сервоконтроллера для отладки управляющего программного обеспечения без двигателя | Есть |
| Габариты моделей SC-60R и SC-25R (прямоугольной формы) | 68мм x 40мм x 16мм |
| Габариты модели SC-60С (круглой формы, полый вал) | Диаметр 60 мм, высота 16 мм, диаметр внутреннего отверстия 24мм |
| Габариты модели SC-25С (круглой формы) | Диаметр 62 мм, высота 16 мм |
| Масса | ~23 гр |
| Энергопотребление в режиме ожидания при неработающем двигателе | 80-120 мА |
- Технические характеристики
- Интернет-Магазин
- SC-120 Datasheet [PDF]
- SC-60 Datasheet [PDF]
- SC-25 Datasheet [PDF]
- SC-series Device Reference [PDF] [HTML]
- SC-series Programming Guide [PDF]
- SC-series C++ Sample Projects [ZIP]
- CANopen Electronic Datasheet [EDS]
- Файлы CAD: SC-120R
- Файлы CAD: SC-60R
- Файлы CAD: SC-60C
- Файлы CAD: SC-25R
- Файлы CAD: SC-25C
- Кабели и разъемы для SC-25 [PDF]
- Брошюра [PDF]
- YouTube: видеоролики
- Telegram: новости
- Волновые редукторы